Kerf Chair +
Its Alive!!! +
Research +
Research cont. +
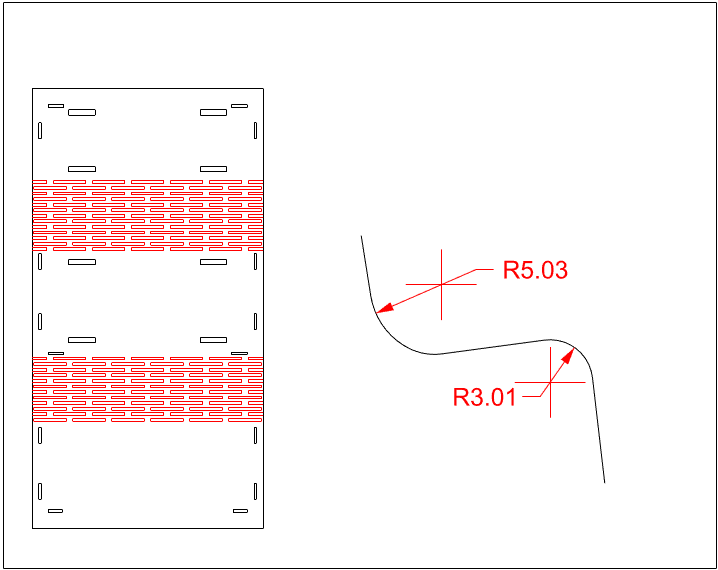
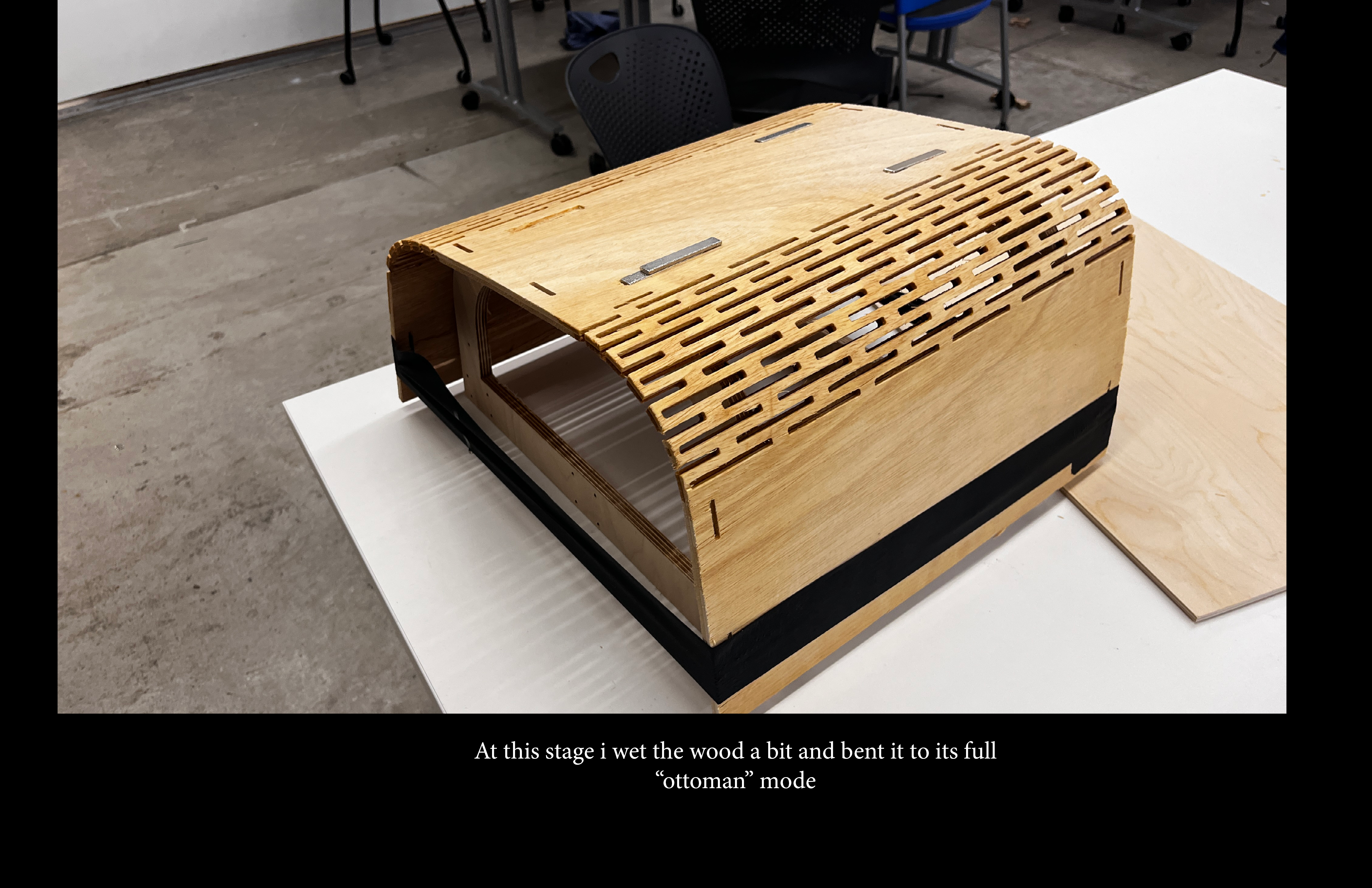
Kerf Cut Pattern +
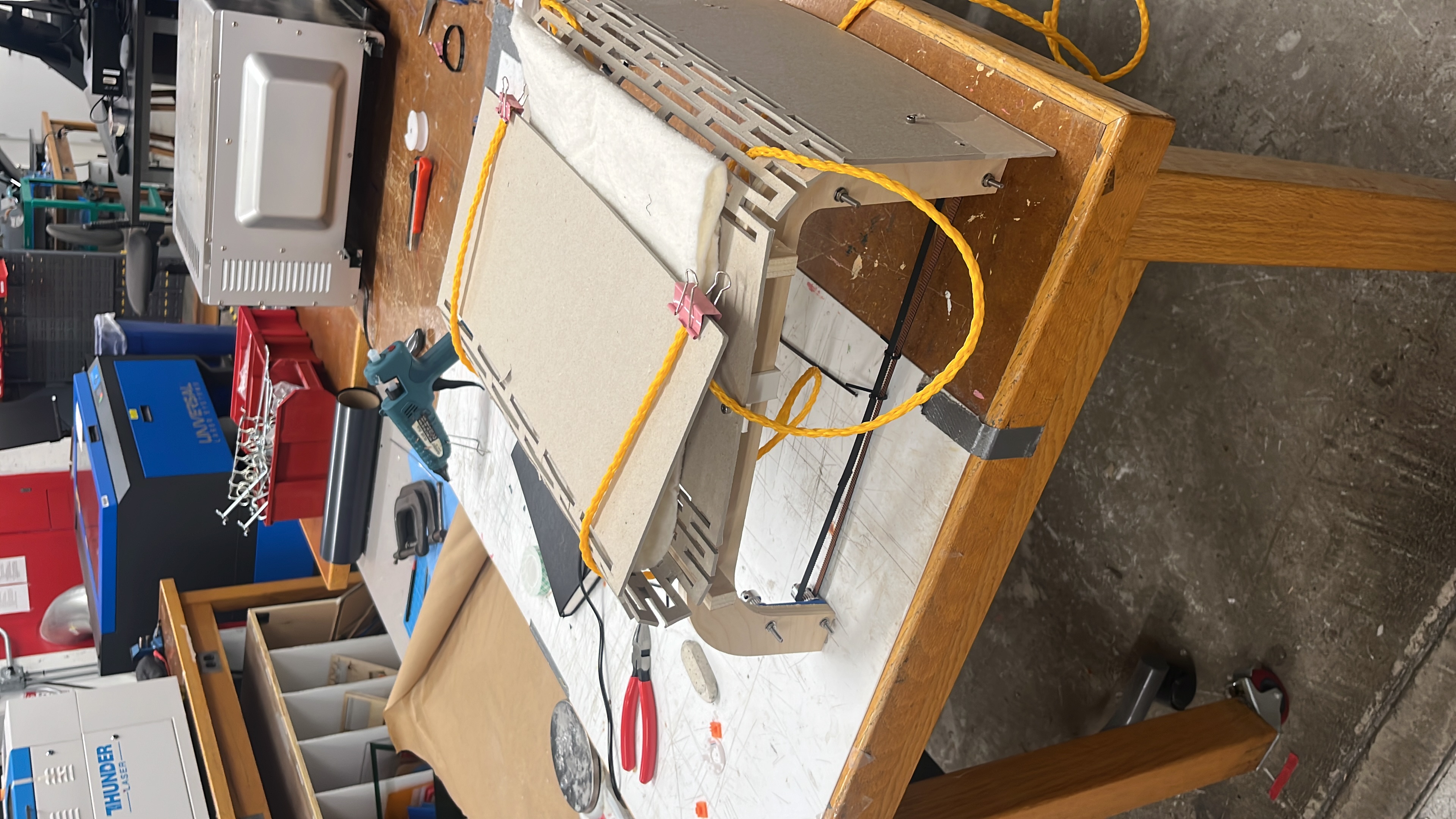
Project Integration (Seat Cushion as revised assignment addition) +
At this stage I was a bit behind regarding electronics
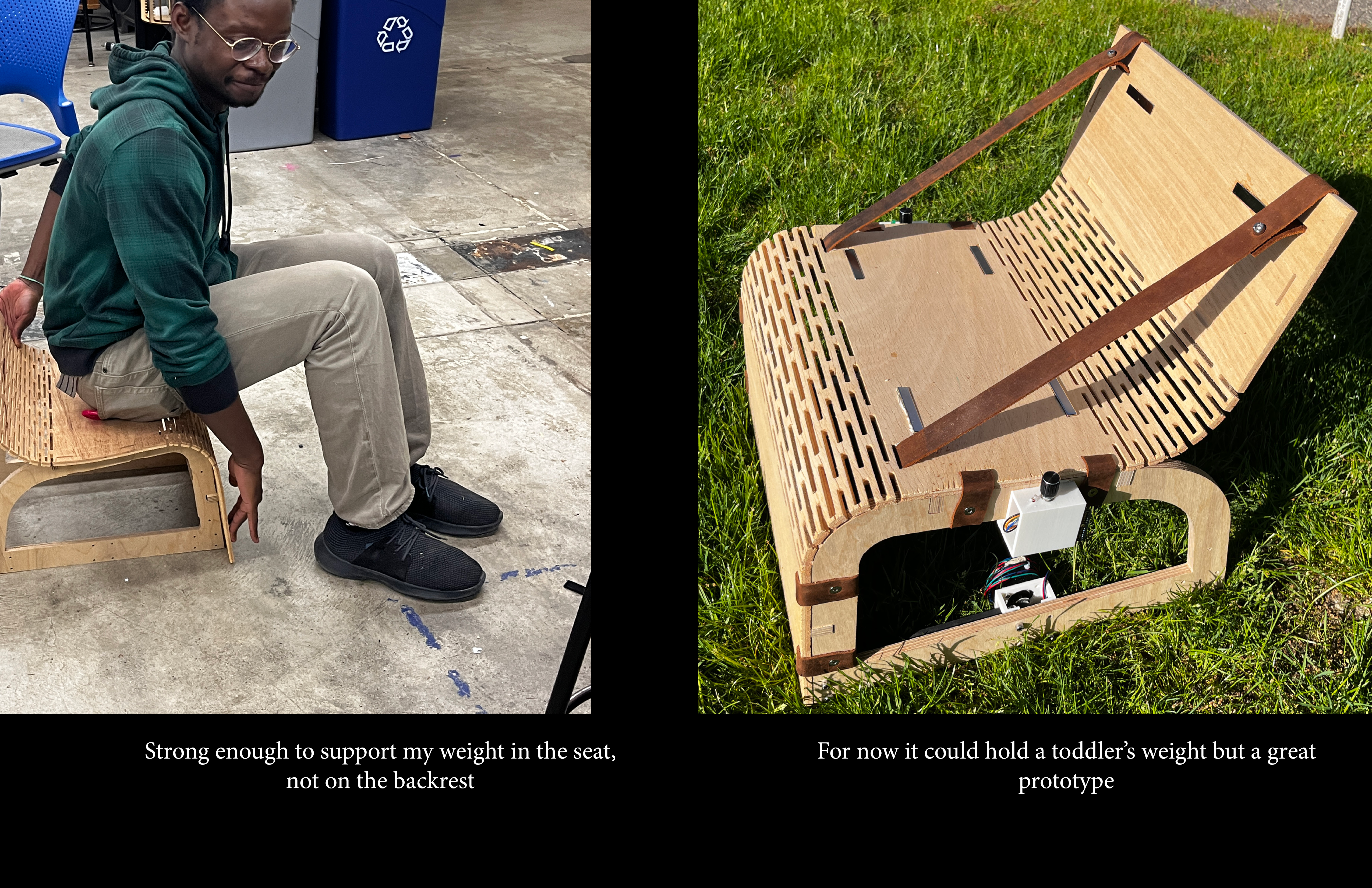
But finally got the working model done
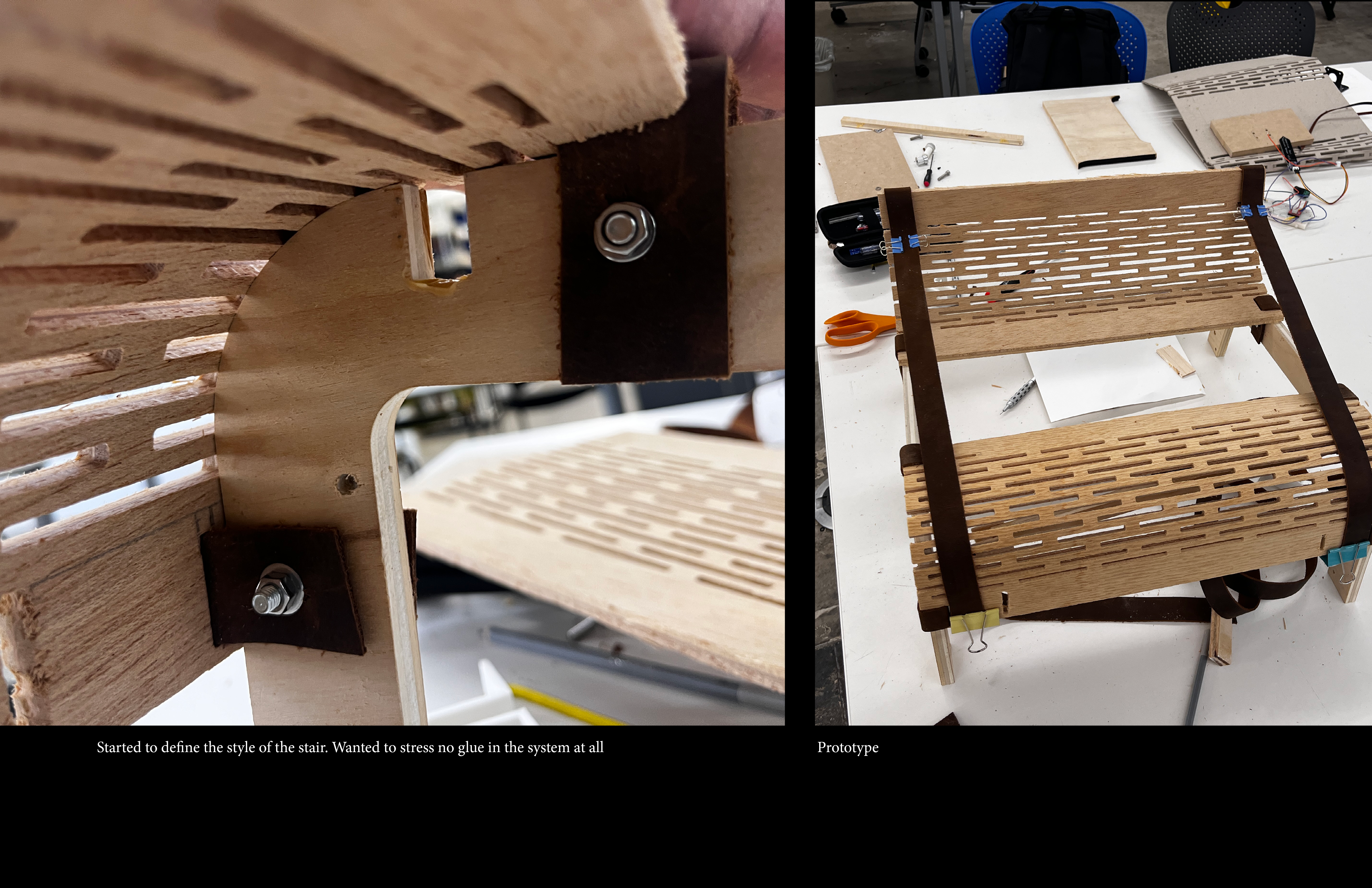
Kept pushing the idea that the chair uses no glue so it can be taken apart and recycled
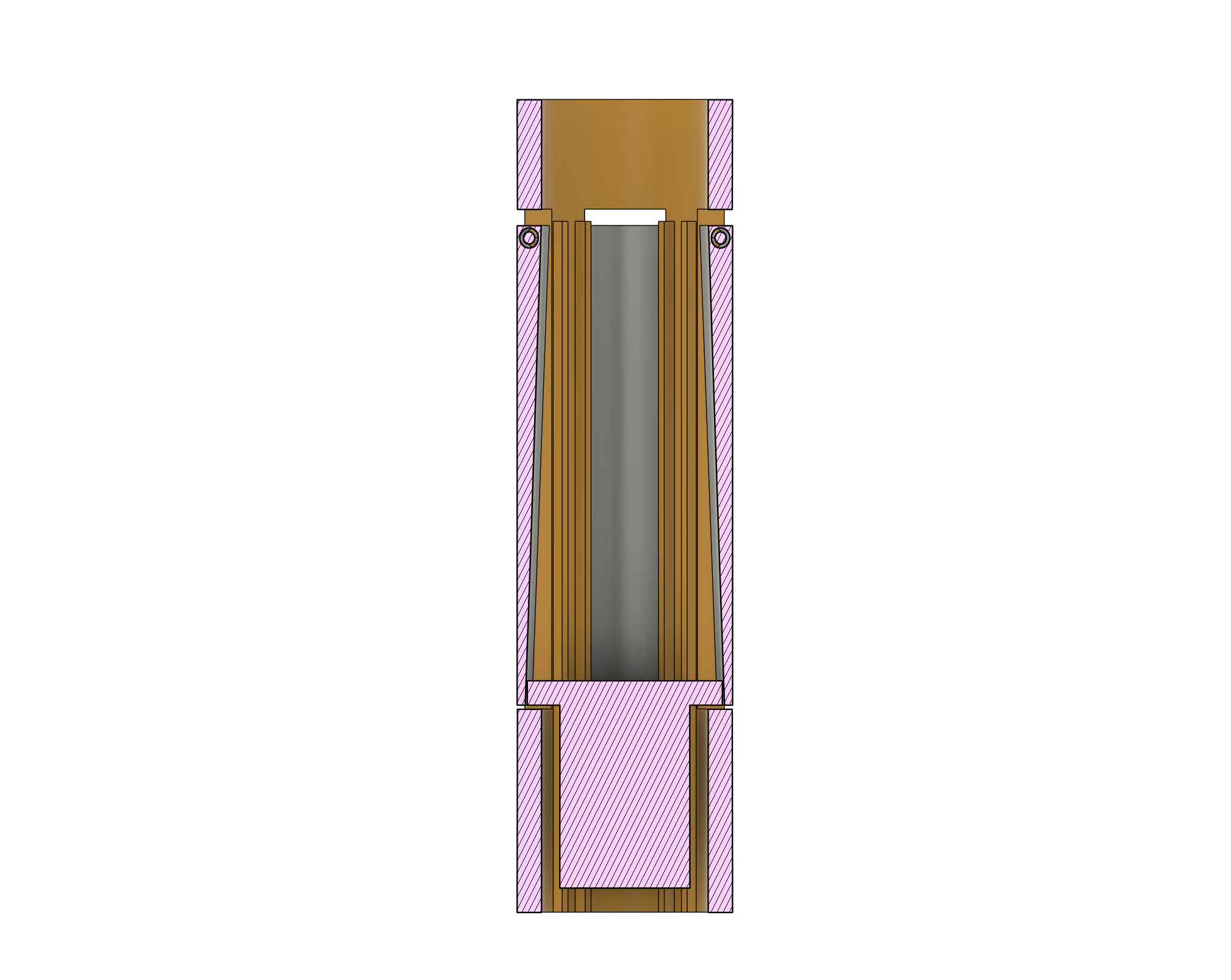
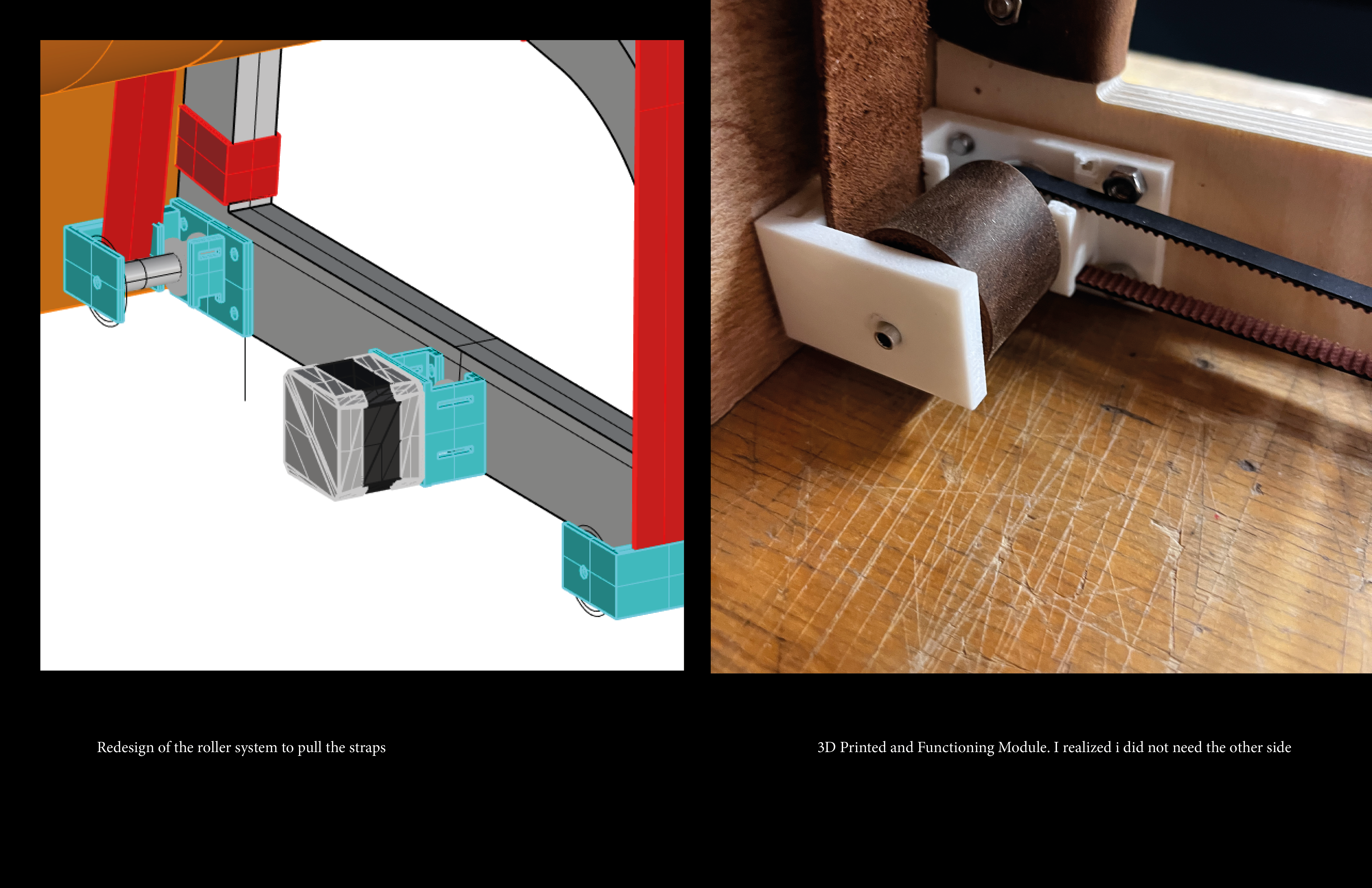
Prototyped the roller system to move the leather
Heated Seat +
Simple but complex function
Did not have it working by demo day
Left bracket with dial and led control the inlain pad
A turn of the dial also lowers or raises the temperature
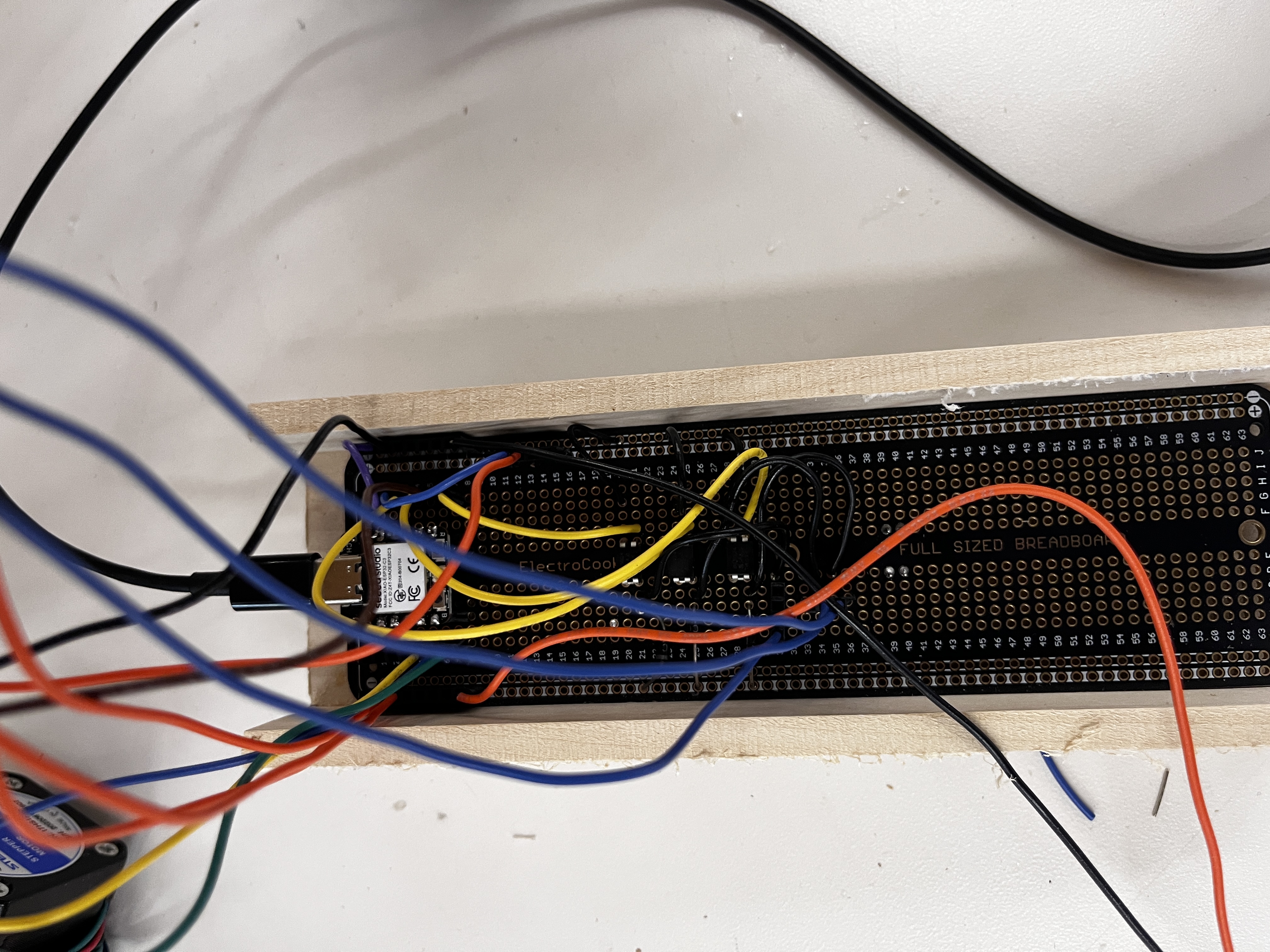
Seat Schematics +
Issues +
Pads are very sensitive to voltage and current
What i thought was not working was the pads just outputting based on the power received
Had to switch from 9V to 19V
Used a mofset system (see circuit)
Even with 19V, 3 pads I need a current over 1.5A
Did not have enough time to test what the temperature value is
The default temp is what the pads receive from the power source
I set that as a cap and the dial just adjusts from that peak
Fired an ESP32C3 because i tried connecting all the pads to one mosfet
Circuit and Code +
used Claude.ai to help refine
Adjustable Backrest +
Orignal Intent +
My ideal scenario was to have the motors help transform the chair
It should be a stool, recliner or upright chair
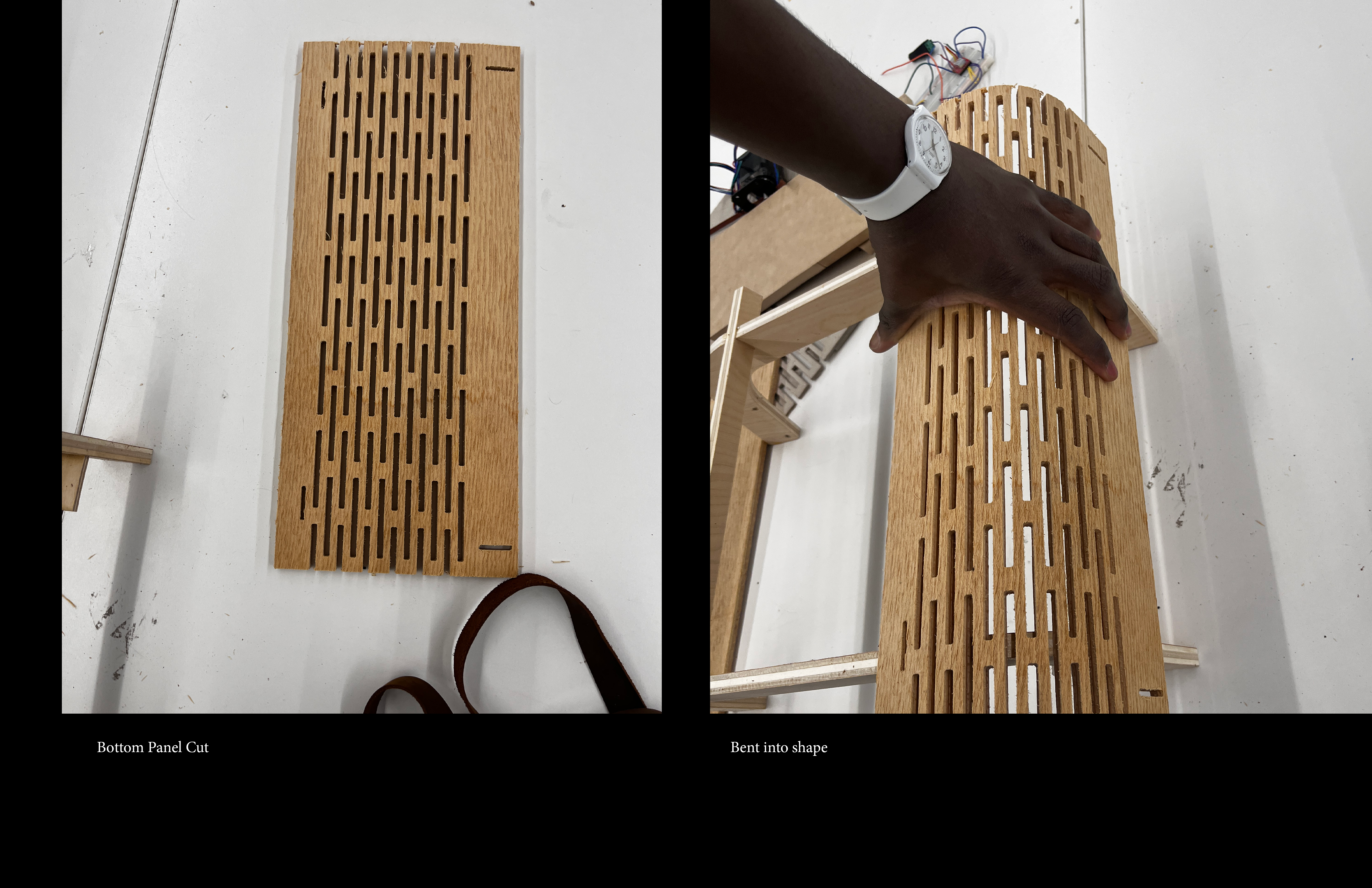
Kerfing allows an extreme range of motion
Issues +
Did not make a consistent enough rolling mechanism
Did not account properly for the weight of the wood
In the third video you can see it drop a bit as the motor unwinds
combination of friction and mechanical failures make it easy to fall back as seen in the video than rise without aid
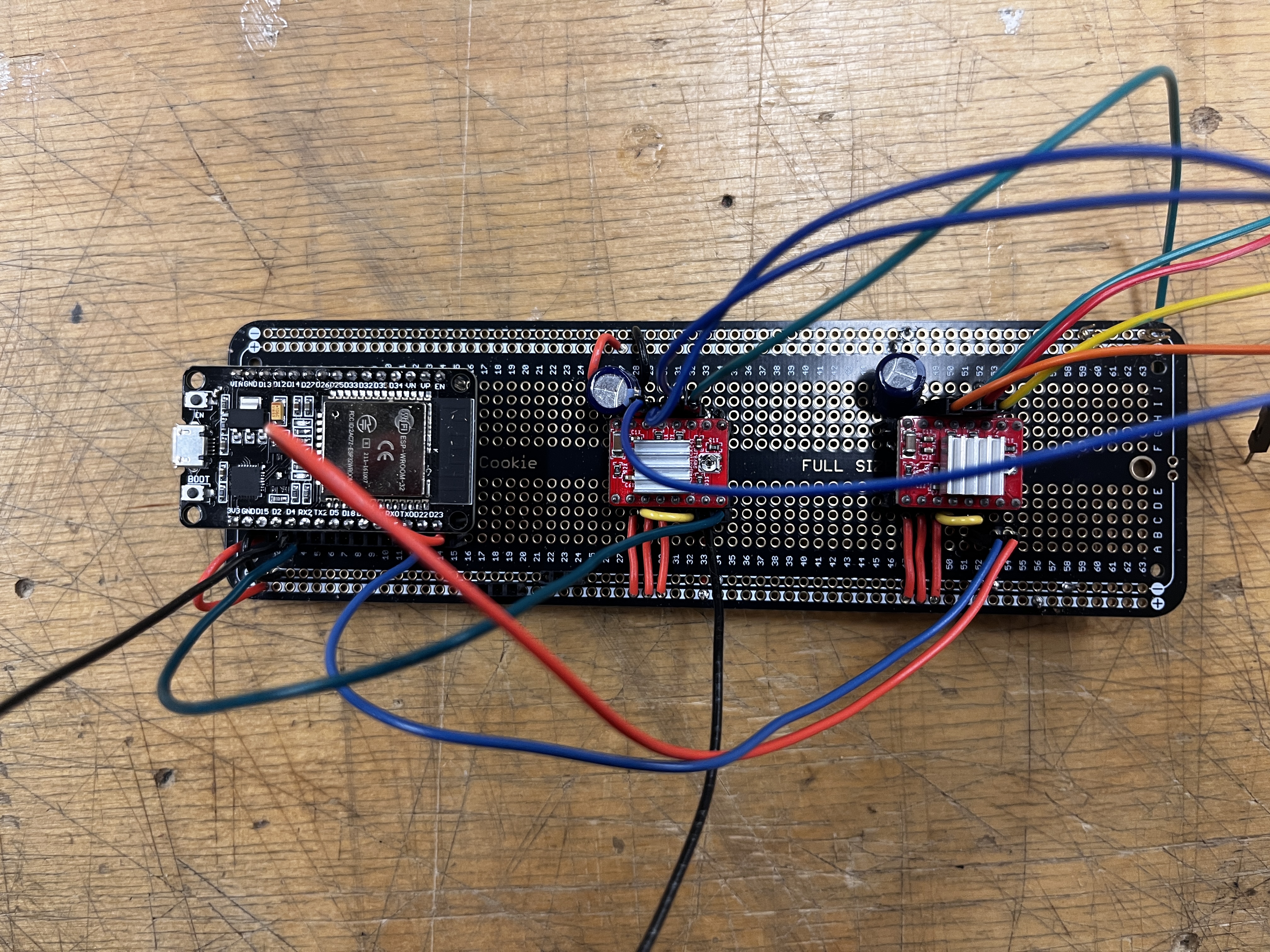
Code and Circuit +
Uses a simple A4988 setup with two stepper motors with micro stepping enabled
Dial encoder with a green led is used to signal turning and operation
A Chair to be replicated +
CNC, 3D Printing, Handiwork
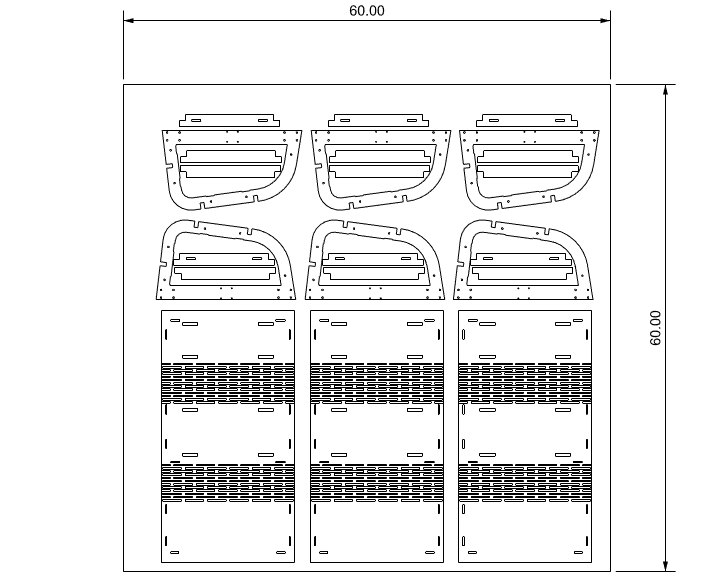
Material Use +
In the future i would like to optimize this
A common sheet of 5x5 could make 3 chairs leaving a 30% that can still be used
DownloadFiles +
Make your own
Caution as the backrest may be dangerous without revision
Made in Rhino7 will update fusion model soon
Inspiration for the chair came from my personal interest in geometry and material efficiency
It highlights the kerfing technique often used to turn rigid materials flexible
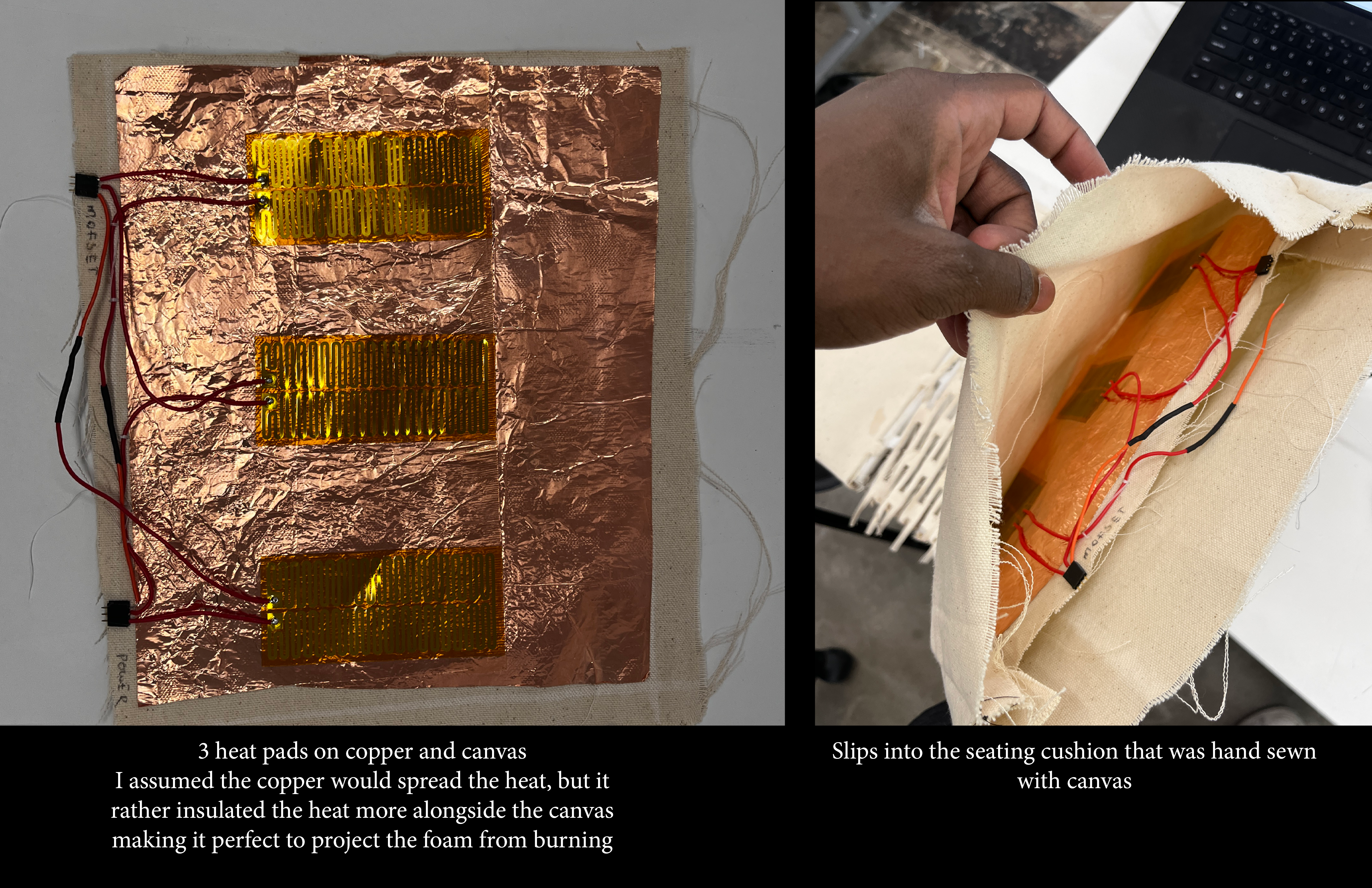
The chair encorporates two elements of a heated seat (functioning)
A roller mechanism for the leather strings to adjust the back rest (glitchy)

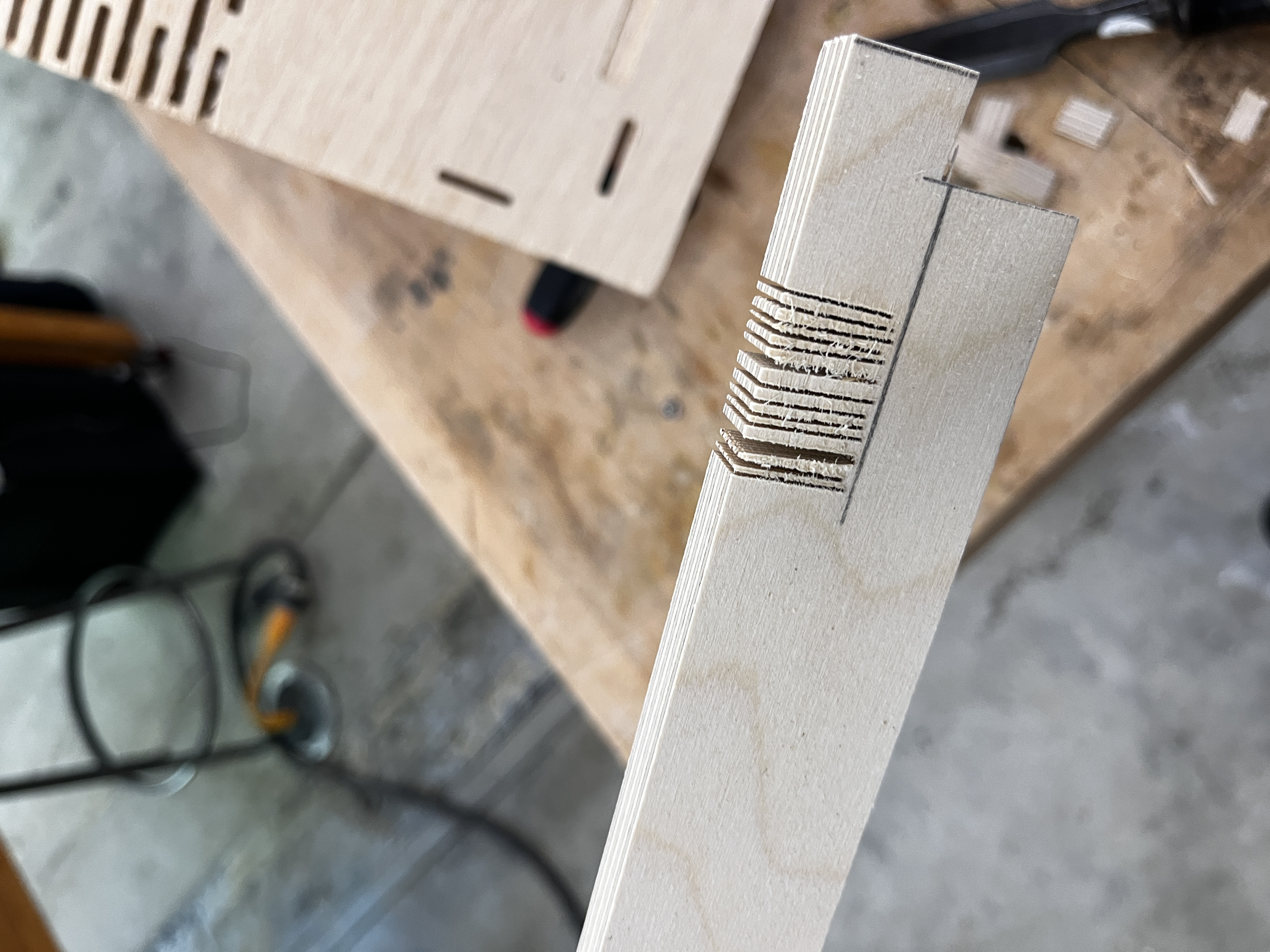
A good part of the semester was spent understanding the limits of the kerf technique
First test on a 1/2 ply wood failed. See Week 7
Per Nathan's suggestion I switched to bendy ply which was a better albeit a less stable replacement
Resources online suggested calculations for bending, but do not fully account for material density
After many test cuts, I figured out that the ratio for 8.5mm bendy ply as i needed is as follows
3 in bend - use 12 rows of staggered 0.2 in deep and 2.3 in wide cuts
5 in bend use 13 rows of the same pattern (which was a bit surprising to me)
Some external resources used:
https://cutlasercut.com/drawing-resources/expert-tips/laser-kerf/
https://www.core77.com/posts/36481/adventures-in-laser-kerf-bending
ChatGPT
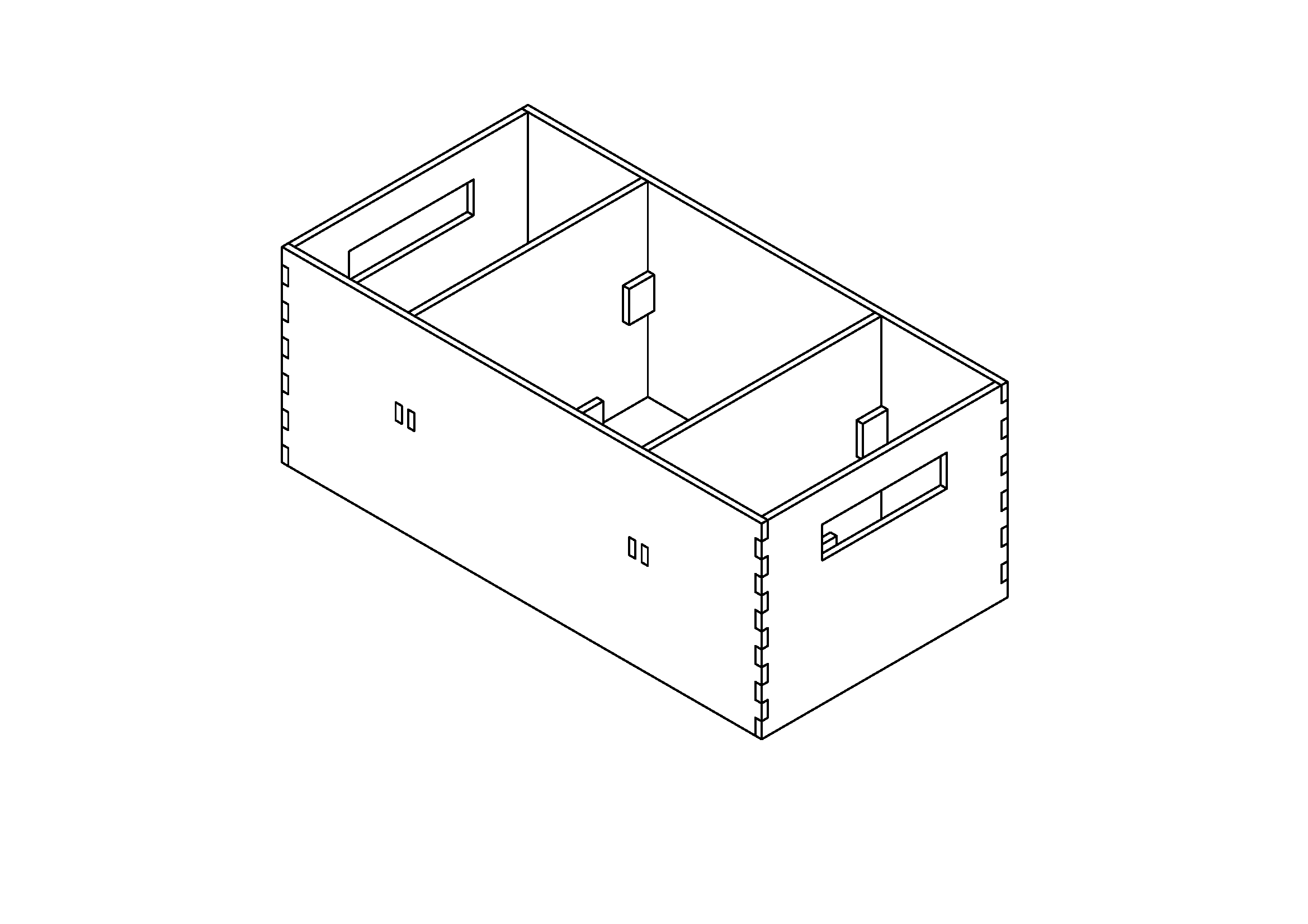
Cushion follows the style fo the stair
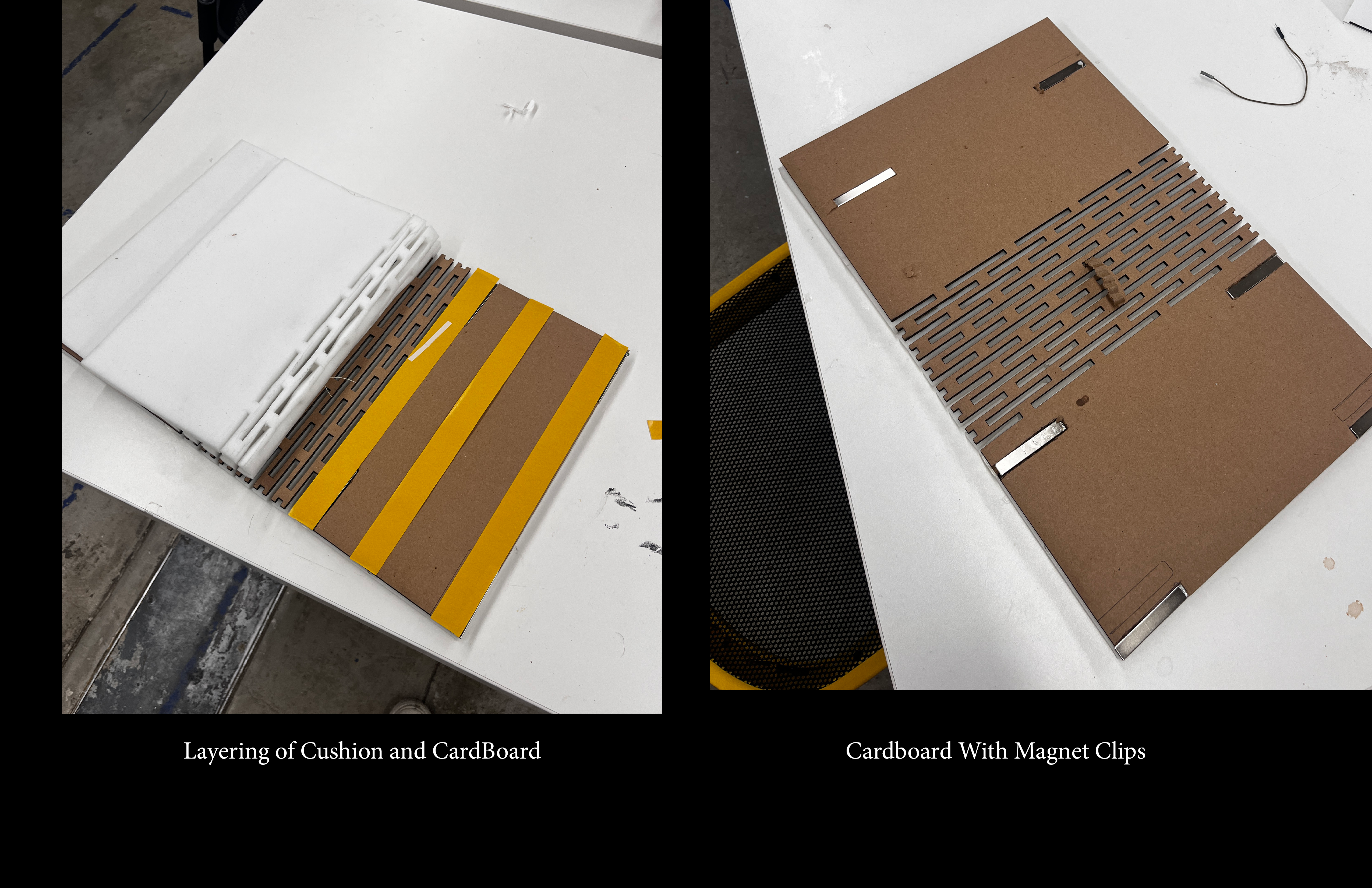
Two piece of foam with a cardboard in between
Cardboard holds magnets to latch onto the frame
Heating uses 3 24V heat pads
Reclining works best as it has less force to overcome
Raising the seat is harder
Did not fully account for the selfweight of the wood and cushion
Future iteration would need either a bigger motor or larger gear ratio
Or keep this fully a manual adjustment that electronic
Straps could have buckles and holes to adjust the angle as needed
Making the chair relied heavily on CNC maching
I primarily used the Zund cutter at the GSD
3D printing was used for pulley and gadgets
All other work was done by hand in PS lab
Part of my goal was to make this chair a template someone could download and recreate